







Прямоточная инфокоммуникационная технология водоснабжения
Водоснабжение является одной из важных отраслей народного хозяйства, поскольку обеспечивает многие технологические процессы в промышленности, но прежде всего является жизнеобеспечивающей отраслью для всего человечества. Особенно это проявляется в загородном жилом секторе и сельскохозяйственном производстве.
Прямоточная инфокоммуникационная технология водоснабжения
Водоснабжение является одной из важных отраслей народного хозяйства, поскольку обеспечивает многие технологические процессы в промышленности, но прежде всего является жизнеобеспечивающей отраслью для всего человечества. Особенно это проявляется в загородном жилом секторе и сельскохозяйственном производстве.
Рост потребления воды в расчете на одного человека постоянно растет и напрямую связан с прогрессом в жизни человечества. Так, до середины XVIII века потребность в бытовой воде не превышала 20 л на человека. Начиная с этого момента и до конца XX века, потребность в воде выросла до 200 л на человека. То есть интенсивность роста потребности в воде за последние два с половиной века более чем в 63 раза превысила интенсивность роста за весь предшествующий период [1].
Вот почему важно постоянно совершенствовать и развивать технологии добычи, подготовки и распределения воды. Прежде всего, это касается загородного жилого сектора, поскольку только в 2000 году мировой объем водозабора в нем составил около 3100 км3 воды, что почти в 3 раза больше, чем в промышленности и коммунальном хозяйстве вместе взятых [1]. Здесь в среднем для подъема 1 м3 воды из источников (поверхностных – 85 % и подземных – 15 %) и подачи ее потребителю необходимо затратить 0,1 кВт•ч электрической энергии. Это означает, что в 2000 году на водозабор было израсходовано более 310 млрд кВт•ч электроэнергии. Для Российской Федерации эта цифра составила почти 25 млрд кВт•ч, что равно более 13,2 млрд руб. Таким образом, даже при 10 %-ном снижении потребляемой электроэнергии можно сэкономить более 1 млрд руб. в год.
Кроме того, водоснабжение загородного жилого сектора имеет свои отличительные черты.
Это, прежде всего, существующий уже сегодня высокий уровень автоматизации систем водоснабжения, работающих без участия человека [2].
Другой чертой является то, что этой области присущи все характерные особенности автоматизации сельскохозяйственного производства. Это связь режимов работы технического оборудования с людьми и животными, потребляющими воду. Многообразие и сложность водопотребляющих процессов, в том числе орошение и водоснабжение фермерских хозяйств, разброс их по большим территориям. Распределение контролируемых параметров по протяженности водопроводных сетей, их случайный характер [3].
Третья черта заключается в технологическом многообразии процесса обеспечения водой. Можно поднять воду из скважины и подать ее потребителю, используя в качестве буфера водонапорную башню или гидропневмоаккумулятор. А можно использовать насосные станции второго подъема с переменной производительностью, применив ступенчатое регулирование или более точное частотное. То же самое многообразие видим и в случае водозабора из поверхностных источников. Вместе с тем, сегодня в этом секторе более 60 % систем – башенные системы с небольшим суточным водопотреблением до 300–400 м3 [3].
Упомянутые особенности определяют характер инноваций при разработке и совершенствовании технологий и техники водоснабжения.
Так, например, высокий уровень автоматизации, многообразие и сложность производственных процессов, распределение контролируемых параметров на большом пространстве требуют применения современных инфокоммуникационных способов управления и контроля, с применением современных частотных электроприводов, компьютерной техники, программируемых контроллеров, протоколов мобильной связи.
То есть автоматизированные инфокоммуникационные технологии водоснабжения за счет более высокого уровня развития автоматизации должны обеспечивать экономию всех видов ресурсов, в том числе электроэнергии.
Прямоточная инфокоммуникационная технологическая схема
Прямоточная инфокоммуникационная технология подъема и подачи воды (рис 1) состоит из следующих элементов:
– скважин;
– погружных электронасосов;
– инфокоммуникационных устройств управления и защиты электронасосов в составе силовых элементов, контроллера, коммуникационного интерфейса, модема GSM и антенны;
– станции управления и защиты частотно-регулируемого насоса в составе силовых элементов, преобразователя частоты и контроллера;
– технологических датчиков;
– трубопровода;
– удаленного (на центрально диспетчерском пункте – ЦДП) компьютера и модема.
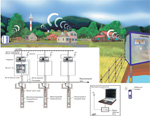 |
Рисунок 1 (подробнее)
Прямоточная инфокоммуникационная технология подъема и подачи воды |
Преобразователь частоты имеет встроенный ПИД-регулятор, а также два входа для подключения датчика давления.
Контроллер имеет 4 дискретных входа, 4 дискретно/аналоговых входа и 4 релейных выхода и решает следующие задачи:
– по сигналам расходомера корректирует заданное давление стабилизации в функции расхода для обеспечения постоянного давления у потребителя;
– использует реальное суточное время для корректировки давления стабилизации в разных диктующих точках сети и в технологических целях (например, снижение давления в ночное время или в часы проведения каких-либо технических работ, повышение в часы «пик»);
– подключает либо отключает нерегулируемые насосные агрегаты (НЭН) в зависимости от недостаточной либо избыточной производительности регулируемого насосного агрегата (РЭН) со сменой статуса («рабочий» – «резервный») насосов;
– осуществляет ввод в работу дополнительного насоса со сменой статуса по схеме: работающий от преобразователя РЭН переключается на сеть и становится НЭН, к преобразователю подключается дополнительный и становится РЭН, вывод – аналогично;
– анализирует работу и определяет вышедший из строя насосный агрегат;
– переключает на резервный насос;
– по анализу потребления объектами воды и информации от датчиков при снижении потребления воды оставляет в работе один специальный насос малой мощности, при возобновлении потребления производит обратные действия;
– производит переключения агрегатов с обеспечением снижения действий гидроударов в водопроводных сетях;
– по сигналам расходомера корректирует заданное давление стабилизации для обеспечения постоянного давления в разных диктующих точках сети и закон управления преобразователя для согласования характеристик привода и насоса.
Управление осуществляется на основании совокупности данных на входных сигналах контроллера, а также в зависимости от выбранных кнопками на панели контроллера режимов работы контроллера, заранее определенных при его программировании. По сигналам внешних датчиков (например, расходомера), по результатам срабатывания элементов защиты (например, тепловых реле) а также в зависимости от выбранных режимов работы контроллера, срабатывают выходные сигналы, которые управляют работой насосной станции в целом и преобразователем частоты в частности.
Коммуникационный интерфейс подключается к контроллеру через встроенный разъем COM-Z и осуществляет двухсторонний дистанционный обмен данных между контроллером и диспетчерским пунктом или управляющим компьютером с помощью подключенного к нему GSM-модема. Интерфейс предназначен для мониторинга или дистанционного управления устройствами, работающими без обслуживающего персонала на удалении. Хранит в себе телефонные номера, адреса электронной почты, а также заранее введенные сообщения и условия их отправки. Когда условия отправки достигнуты, сообщение, которое может включать в себя текущие значения величин и параметров работы, отправляются на диспетчерский пункт или мобильный телефон. При обратной отправке сообщения содержат команды управления.
GSM-модем подключается к коммуникационному интерфейсу через встроенный разъем COM-M. Имеет съемный держатель для SIM-карты (типа Micro-SIM). Предназначен для передачи информации, подготовленной коммуникационным интерфейсом, конечному адресату на заранее определенный телефонный номер или адрес электронной почты, которые также заранее записываются при программировании контроллера в коммуникационный интерфейс. Для возможности дистанционной работы с удаленной станцией, она должна находиться в зоне покрытия сотовой связью (GSM) и иметь SIM-карту соответствующего оператора сотовой связи с возможностью передачи информации.
ЦДП должен быть оборудован персональным компьютером с модемом (GSM или аналоговым, подсоединенным к городской телефонной сети), соответствующим программным обеспечением.
Основные показатели новизны
1. Подъем воды из подземного источника (естественного резервуара) и подача воды в водопроводную сеть с требуемым потреблением осуществляется по прямоточной технологической схеме с комбинированной компоновкой насосов.
Прямоточная инфокоммуникационная технология подает воду из скважин с переменным расходом и давлением напрямую потребителю. Изменение расхода подаваемой воды согласовано с требуемым переменным расходом потребления, а давление регулируется в функции расхода так, чтобы компенсируя потери давления в трубопроводе, обеспечить постоянное давление у потребителя в диктующей точке. Диктующие точки меняются в соответствии с графиком «время – приоритет». Переменная производительность насоса обеспечивается преобразователем частоты питающего напряжения.
2. Стабилизация давления у потребителей согласно технологическому графику с учетом потерь давления на разных участках сети и пространственного положения потребителей в различных диктующих точках приводит к снижению энергозатрат, материальных и водных ресурсов.
Стабилизация давления воды является основным фактором ресурсосбережения. Решение его осложняется тем, что различные потребители в водопроводной сети и технологические процессы, их представляющие, требуют различного постоянного давления, в различное время. Зачастую интервалы времени накладываются друг на друга, а потребители находятся друг от друга на значительных расстояниях. Поэтому при решении вопроса стабильного давления необходимо учитывать приоритетность процессов, их пространственное положение. А это напрямую оказывает влияние на сбережение ресурсов, в первую очередь энергии, трубопроводов и воды. Вопросы снижения материалоемкости и потерь воды рассмотрены в [4, 5]. Оценим энергосбережение.
Существуют два способа стабилизации давления в технологических схемах водоснабжения.
В первом случае давление Нст1 стабилизируют на выходе насосной станции. При этом давление задают с учетом его потерь ΔНПТ в трубопроводе, чтобы у потребителя даже при наибольшей величине расхода Qmax давление не опускалось ниже заданного значения Нзад. Во втором случае давление Нст2 стабилизируют непосредственно у потребителя. Это достигается либо установкой датчика контроля давления у потребителя, либо корректировкой уставки давления в функции расхода, если датчик установлен на выходе насосной станции как в первом случае (рис. 2). При этом давление на выходе насосной станции, а следовательно, и создаваемое насосом, меняется по закону
![]() (1)
(1)
где Z – гидравлическое сопротивление сети [6].
 |
Рисунок 2. Способы стабилизации давления в технологической схеме водоснабжения |
Очевидно, что мощность электронасоса, следовательно, и потребляемая электроэнергия в первом случае и во втором случае будут иметь различные значения. Оценим эту разницу.
В первом случае мощность численно равна площади прямоугольника ограниченной осями координат и прямыми Н = Нст1 и Q = Qmax. Во втором случае – осями, прямой Q = Qmax и кривой (1). Значениями КПД пренебрегаем ввиду их незначительной разницы [6]. Запишем выражения мощностей для рассматриваемых случаев:
 (2)
(2)
 (3)
(3)
Определим относительное сокращение мощности насоса при стабилизации давления у потребителя по сравнению со стабилизацией на выходе насосной станции.
 (4)
(4)
Для определения разности стабилизируемых давлений воспользуемся равенством значений давления в точке пересечения графиков H = Hст1 и
H = Hст2 + ZQ2. Абсцисса этой точки равна Qmax.
![]() (5)
(5)
Сделав преобразования в (4) с учетом (5) получим:
![]() (6)
(6)
На практике в среднем значения давления стабилизации с учетом потерь и потери давления имеют следующие величины: Hст1 = 50 м вод. ст., DHПТ = 5 м вод. ст.. Окончательно получаем среднюю оценку сокращения мощности и энергозатрат для второго случая стабилизации по сравнению с первым DD = 6,7 %.
3. Корректировка закона регулирования напряжения преобразователя при изменении статического давления погружного частотно-регулируемого электронасоса в разных диктующих точках обеспечивает его энергоэкономную работу в безопасном тепловом режиме.
Обеспечение различного давления стабилизации, а значит и статического давления насоса в зависимости от места диктующей точки в сети позволяет снизить энергопотребление вследствие перенастройки закона управления преобразователя.
При работе преобразователя изменение частоты всегда сопровождается изменением амплитуды выходного напряжения, между которыми существует математическая зависимость. Эта зависимость в практике эксплуатации насосов, работающих без статических давлений (противодавлений), неизменно устанавливается степенной, с показателем, равным двум. Вместе с тем, амплитуда напряжения влияет на потери и нагрев.
Снижение потерь в двигателе является одним из основных вопросов рационального управления частотного привода, заключающегося в оптимальном, по условию минимума потерь, соотношении между амплитудой и частотой напряжения, питающего двигатель в процессе регулирования [7].
Необходимо определить это соотношение для погружного электронасоса, поскольку минимум потерь обеспечит энергоэкономный режим и допустимый нагрев для его безаварийной работы.
М. П. Костенко установил общий закон оптимального управления напряжением:
![]() (7)
(7)
где g, a, m – соответственно относительные значения напряжения, частоты и момента на валу двигателя (за базовые величины приняты их номинальные значения).
Для нормальной работы механизма с электроприводом необходимо чтобы механическая характеристика привода m = f(w*), где w* – относительная частота вращения электродвигателя, соответствовала механической характеристике механизма.
Когда нагрузкой двигателя является вентилятор, момент сопротивления которого зависит от частоты вращения (или от частоты питающего напряжения) в функции квадрата m = a2, то, согласно (7), закон управления напряжением при вентиляторной нагрузке будет иметь вид:
![]() (8)
(8)
Для погружного электронасоса, отличительной особенностью которого является режим работы с большими статическими напорами Hст (противодавлениями), определяемыми той высотой, на которую необходимо поднять воду из глубины скважины до места расположения диктующей точки, механическая характеристика будет иметь вид, отличный от вентиляторной (рис. 3). Здесь противодавление Hст выражено в относительных единицах. За базовую величину принято давление насоса Hоп при расходе, равном нулю.
 |
Рисунок 3. Механическая характеристика насоса для различных значений статического напора |
Поскольку закон управления по (7) предусматривает регулирование напряжения, а следовательно, и потока непрерывно, соответственно изменению нагрузки, можно говорить о прямой пропорциональности напряжения и момента, т. е. g ~ m. Данный факт позволяет говорить об идентичности графиков механической характеристики и закона управления, что и является условием работы двигателя в режиме минимальных потерь и нагрева.
Чтобы это условие было обеспечено для случая, когда механическая характеристика насоса отлична от квадратичной характеристики, необходимо выбрать закон управления напряжением преобразователя согласно (7), где учитывалась бы механическая характеристика насоса, работающего с противодавлением (рис. 3).
Преобразователь частоты имеет различные виды настроек, в том числе выбор и установку четырех зависимостей g=an, где n = 1,5; 1,7; 2; 3, а также произвольной зависимости, задаваемой параметрами, указанными на рис. 4.
Поскольку произвольная зависимость задается двумя линейными графиками, то имеет смысл представить механические характеристики (рис. 4) прямыми вида m = вω*+с.
 |
Рисунок 4. Задаваемая зависимость g(a) преобразователя частоты |
Закон управления напряжением получим следующим образом. Относительная частота вращения определяется соотношением
ω*=(α-β),
где β=f2/f1n – параметр абсолютного скольжения, рассматриваемый как промежуточный параметр нагрузки;
f2 – частота ротора [7].
Управление по закону (7) не обеспечивает полный минимум потерь в двигателе при всех частотах. Двигатель будет работать с минимальными потерями, если изменение частоты будет сопровождаться изменением напряжения соответственно моменту нагрузки так, чтобы β имело определенное значение. Это значение находим из условия минимума электромагнитных потерь δPэм/δβ = 0. В [7] показано, что для практических расчетов абсолютное скольжение можно принять постоянным β = βс ≈ Sn, где Sn – номинальное скольжение. Подставляя в (7) выражение механической характеристики в виде линейной функции и заменяя частоту вращения ее выражением через частоту и абсолютное скольжение, получаем:
![]() (9)
(9)
Управление по закону (9) обеспечит меньшую величину потерь по сравнению с управлением по закону (8), а следовательно, и меньший нагрев двигателя.
Коэффициенты b и с в (9) имеют различные значения для различных Hст, поэтому при смене диктующих точек необходимо корректировать закон управления, а значит и эти коэффициенты. В противном случае электронасос будет работать с завышенными потерями и энергопотреблением.
Оценим численно этот перерасход. Для этого сравним величину потерь для двух режимов электронасоса. В первом режиме при Hст = 0,82 и расходе 1,0 м3/ч закон управления напряжением соответствует (8). Во втором режиме закон регулирования при том же противодавлении и расходе соответствует (9). Выполненные расчеты для погружного электродвигателя ПЭДВ 1,5-96 показали, что потери во втором режиме снизились в 4,1 раза [9].
Рассчитаем экономию энергопотребления. Она будет определяться относительным сокращением мощности насоса во втором режиме по отношению к первому режиму:
 (10)
(10)
Отношение мощностей при условии изменения потерь, а значит, и КПД электродвигателей для двух режимов будет равно отношению полных мощностей, т. е. сумм полезной мощности и мощности потерь:
![]() (11)
(11)
где
Коэффициент k определим из известного соотношения для КПД электродвигателя η = 1/(1 + k), где η в диапазоне регулирования производительности электронасоса можно принять равным среднему значению, который в свою очередь близок номинальному для данного двигателя, т. е. η = ηср = 0,8. Отсюда k = 0,25.
Подставляя полученные величины в (10) и (11), рассчитываем экономию электроэнергии
4. Обеспечение алгоритма комбинированного регулирования подачи воды.
Применение в системах водоснабжения комбинированной компоновочной схемы, где совместно с частотно-регулируемым электронасосом работают нерегулируемые электронасосы разной производительности, позволяет получить дополнительную экономию электроэнергии до 11 % по сравнению со схемой, где работает один регулируемый насос [10]. Экономия достигается за счет перераспределения потоков подачи насосов так, что каждый из них работает в зонах наиболее возможно максимальных для данных расходов КПД.
5. Передача информации о режимах, в том числе аварийных, технологического оборудования с помощью сотовой связи GSM от скважин на центральный диспетчерский пункт (ЦДП) и мобильные телефоны должностных лиц в виде SMS-сообщений.
Коммуникационный интерфейс, осуществляя дистанционный двухсторонний обмен данных между контроллером и управляющим компьютером с помощью подключенного к ним GSM-модемов, позволяет за счет оперативной информации сократить время аварийных простоев оборудования и снизить ущерб.
6. Компьютерная обработка информации, получение на ЦДП оценок режимов функционирования оборудования и расчет критерия оптимальных режимов.
Критерий оптимального режима – минимум затрат на подъем и подачу воды рассчитывается на основе показателей КПД работающих насосов и обеспечивается соотношением их подач.
7. Оперативное управление режимами оборудования в случае отклонения критерия от оптимальной величины и корректировка уставок автоматического управления оборудованием и его защиты с помощью сотовой связи GSM.
По значению расхода инфокоммуникационная система корректирует заданное давление стабилизации для обеспечения постоянного давления в разных диктующих точках сети и технологических целях. Корректирует закон управления напряжением преобразователя, а также подключает либо отключает нерегулируемые насосные агрегаты в зависимости от недостаточной либо избыточной производительности регулируемого насосного агрегата и величины критерия оптимального режима.
8. Дистанционный запуск и остановка электронасосов, в том числе резервного с помощью сотовой связи GSM.
Практическая и теоретическая значимость
Определены дополнительные резервы экономии ресурсов (табл. 1).
Кроме того, снижаются ущербы ввиду сокращения времени простоя оборудования. Сокращение обеспечивается оперативностью информирования об аварийных ситуациях или предупреждением их с помощью мобильной сотовой связи.
Применение средств сотовой связи (телефон, КПК) обеспечивает мобильность диспетчерского пункта, информированность ответственных лиц независимо от места их пребывания о режимах работы, оперативное управление с помощью мобильного телефона, что важно для успешного выполнения ими своих обязанностей.
| Таблица 1 Дополнительные резервы экономии ресурсов |
||||||||||||||||||||||
|
||||||||||||||||||||||
Выводы
1. Актуальность создания инфокоммуникационных технологий водоснабжения определяется широким спектром использования воды во всех сферах деятельности человека, особенно в загородном жилом секторе, а также значительной энергоемкостью водообеспечения и сложностью технологий водоснабжения.
2. Новизна полученных результатов заключается в создании технологии и технических средств водоснабжение нового поколения, обеспечивающих:
– значительную экономию материальных и энергетических ресурсов;
– реализацию инфокоммуникационных технологий в водоснабжении;
– повышение эффективности мобильного и оперативного управления.
3. Технология позволяет получить дополнительную экономию электроэнергии 33 %, капиталовложений более 28 %, воды до 4 %, материалов на трубопроводы более 6 %, стоимости коммуникаций более чем в 3 раза.
4. Применение средств сотовой связи протокола GSM обеспечивает оперативность управления и информирования ответственных лиц. Это приводит к сокращению времени простоя оборудования и снижению ущерба при авариях.
5. Инфокоммуникационная технология водоснабжения внедрена на водозаборном узле ОАО ПЗ «Петровское», обеспечивает надежную подачу воды на животноводческий комплекс, передачу информации об аварийных ситуациях, уровне воды в резервуаре, состоянии насоса, уровне асимметрии фазных напряжений в сети, рабочего тока, потребляемой электроэнергии и сопротивлении изоляции на удаленный ЦДП.
Литература
1. Лосев К. С. Вода. Л., 1989.
2. Концепция автоматизации технологических процессов сельскохозяйственного производства на период до 2010 года. М., 2000.
3. Гришин А. П. Концепция развития основных вопросов автоматизации сельскохозяйственного водоснабжения // Пятый международный конгресс «Вода: экология и технология» Экватэк – 2002: Тезисы докладов. М., 2002.
4. Воронин Е. А., Гришин А. П., Рождественский И. В. Использование системы автоматической стабилизации давления воды в сельских водопроводных сетях. НТБ. Вып. 2 (46). М., 1982.
5. Воронин Е. А., Гришин А. П., Рождественский И. В. Использование системы автоматической стабилизации давления воды в закольцованных водопроводных сетях с.х. назначения. НТБ. Вып. 3 (52). М., 1984.
6. Гришин А. П., Гришин В. А. Коэффициент полезного действия частотно-регулируемого электронасоса // Автоматизация и информатизация электрифицированного сельскохозяйственного производства: Научные труды. Т. 89. М., 2004.
7. Булгаков А. А. Частотное управление асинхронными двигателями. М., 1966.
8. Гришин А. П. Влияние законов регулирования преобразователя частоты на ресурсосбережение погружного частотно-регулируемого электронасоса. www.ateweb.ru.
9. Методические рекомендации по выбору оборудования для частотно-регулируемой насосной станции второго подъема с комбинированной компоновочной схемой. М., 2006.

Статья опубликована в журнале “Сантехника” за №5'2007



Статьи по теме
- Водоснабжение и водоотведение высотных зданий
Сантехника №5'2004 - XI Европейский АВОК-EHI симпозиум «Современное энергоэффективное оборудование для теплоснабжения, климатизации и водоснабжения зданий.Технологии интеллектуального здания».
АВОК №5'2007 - Автоматизация систем водоснабжения
Сантехника №4'2011 - Ресурсосбережение в системах водоснабжения и водоотведения
Сантехника №1'2012 - Водоснабжение жилых зданий – проблема учета и расчетов
Сантехника №1'2004 - Энергосберегающие способы управления лопастными насосными агрегатами в системах водоснабжения при нестационарной нагрузке
Сантехника №4'2006 - Насосы и насосные установки для высотных зданий
Сантехника №6'2004 - Определение объема баков-аккумуляторов в системах горячего водоснабжения
Сантехника №4'2018 - Их нравы: инженерные особенности английской ванной комнаты
Сантехника №4'2024 - Опреснение воды: электрические и комбинированные системы
Сантехника №2'2007


Подписка на журналы



